ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА
A.M. Измайлов
Измерительный преобразователь для контроля скорости звука в морской воде построен по принципу следящего уравновешивания длительности зондирования акустическим импульсом исследуемой среды на заданном базовом расстоянии периодом импульсов, кратным периоду импульсов управляемого по частоте генератора. Преобразователь имеет высокую точность измерения, достигаемую путем практического исключения составляющей случайной погрешности, вызываемой колебаниями амплитуды приемного сигнала вследствие нарушений акустической прозрачности исследуемой среды различными возмущающими факторами.
Длина акустической базы преобразователя 0.1 м; диапазон измерения 1400-1600 м/с; выходной сигнал - частотный 140-160 кГц; абсолютная основная погрешность ±0.035 м/с; время
установления выходного сигнала <0.6 с.
Контроль скорости распространения акустических колебаний (звука) в жидкостях позволяет получать оперативную информацию о таких параметрах среды, как температура, плотность, концентрация, давление и т.д.
Среди средств измерения скорости звука в жидких средах, предложенных за последние десятилетия, большой интерес представляют приборы, построенные по принципу следящего уравновешивания, и в частности, частотно-временные, обладающие более высокими метрологическими показателями по сравнению с импульсно-циклическими [1], широко применявшимися в практике океанологических
исследований до середины восьмидесятых годов. В основу работы таких измерителей скорости звука положен принцип следящего уравновешивания длительности Т интервала зондирования акустическим импульсом исследуемой среды на базовом расстоянии S длительностью периода Т выходных импульсов, кратного периоду импульсов управляемого по частоте генератора.
Длительность т интервала отсчитывается от момента запуска генератора, формирующего короткий импульс ударного возбуждения. Ударный импульс воздействует на пьезоэлемент-излучатель, вырабатывающий акустический импульс, который зондирует среду до момента формирования компаратором на заданном пороговом уровне приемного электрического сигнала, сформированного на выходе приемника акустическим импульсом, прошедшим среду на расстоянии S. Отслеживание
выполняется коррекцией частоты f колебаний управляемого генератора. В установившемся режиме работы измерителя среднее значение длительности Т периода равно длительности т интервала зондирования. Компаратор выделяет и формирует приемный электрический сигнал, имеющий практически синусоидальную форму амплитудой Um и длительностью (1.0-1.5) периода Тр резонансной частоты пьезоэлемента, в импульс прямоугольной формы пороговым напряжением Un. Задержка тк, вносимая временем нарастания приемного электрического сигнала до напряжения Un,
составляет тк = (l/2n) Tp'arcsin (Un/Um).
При измерении скорости звука нередко имеют место частичные нарушения акустической прозрачности среды, вызываемые различными неоднородностями последней - слои, насыщенные газами или микроорганизмами, участки с различными температурными градиентами, турбулентные течения и т.д. Эти нарушения носят случайный характер и приводят к случайным уменьшениям амплитуды Um принятого электрического сигнала вследствие рассеяния энергии акустических импульсов, распространяющихся в акустическом канале преобразователя.
Случайные изменения амплитуды Um при постоянном значении порогового напряжения Un компаратора приводят к случайным модуляциям интервала т зондирования, вызывающим случайные модуляции частоты/колебаний управляемого генератора, являющейся мерой скорости звука.
Таким образом, имеющие место частичные нарушения акустической прозрачности исследуемой среды, вызывающие изменения отношения Un/Um и частоты f, будут приводить к образованию шумовой составляющей случайной погрешности, снижающей точность измерения скорости звука (это справедливо и для других импульсных средств измерения скорости звука, например, импульсно-циклических и времяпролетных).
Ниже приводится описание варианта схемы преобразователя, в котором порог компаратора при приеме каждого последующего принятого сигнала устанавливается на уровне Un, задаваемом долей амплитуды Um предыдущего принятого сигнала. В таком решении обеспечивается постоянство отношения Un/Um, что практически исключает рассмотренную выше составляющую случайной погрешности. Использование амплитуды предыдущего принятого сигнала для формирования опорного напряжения для последующего принятого сигнала правомерно благодаря весьма малому интервалу времени (среднее значение 135 мкс) между зондирующими акустическими импульсами. При этом предполагается, что акустическая обстановка в канале зондирования за такое время практически не изменяется.
Работа прибора поясняется структурной схемой (рис. 1) и диаграммами сигналов (рис. 2).
Выходные импульсы управляемого по частоте генератора Гн1 [2] с частотно зависимыми элементами на варикапах В1 и В2 нормализуются по амплитуде компаратором ТН1 и через счетчиковыи делитель СТ частоты с коэффициентом деления К поступают на выход распределителя RG, задающего последовательность работы функциональных блоков измерителя. Временные расположения импульсов на выходе делителя СТ и выходах 0-8 распределителя RG приведены соответственно на
диаграммах «а» и «б—л».
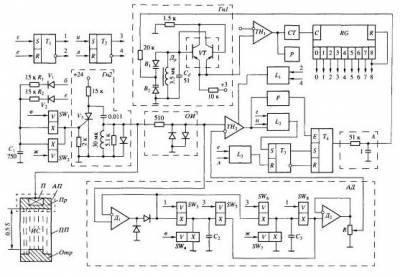
Рис. 1. Схема преобразователя. Т1-ТЗ - триггеры К561ТМ2; Гн1 - управляемый генератор (В1, В2 - КВ104В, VT - 2ТС3103А); ТН1 - компаратор (К554САЗ); СТ - счетчиковый делитель частоты (К561ИЕ8); Р- цифровой частотомер 43-34; RG - распределитель импульсов (К564ИЕ8); SW1-SW8 - ключи (К561КТЗ); Гн2 - генератор импульсов ударного возбуждения (V3 - КУ104Г); ОИ - ограничитель импульсов; ТН2 - компаратор (К554СА1); LI, L3 - элемент ИЛИ (К561ЛЕ5); L2 - мажоритарный элемент (К561ЛП13); F - одновибратор; Т4 - К561ТР2; А - интегратор; ПП- первичный преобразователь (П - пьезоэлемент, АП - акустический преобразователь, Пр - протектор, Отр - отражатель, ИС - исследуемая среда) ; АД - амплитудный детектор (Д1 - КР544УД2, Д2 - КР140УДА8А, R - резистивный делитель) ; все диоды - К522А.
Импульсом в замыкаются коммутирующие выводы X ключа SW4, разряжающего запоминающий конденсатор С2 амплитудного детектора АД, и выводы X ключа SW1, через которые током разряда конденсатора С1 (предварительно заряженного импульсом «б» через диод VI и резистор R1) производится запуск тиристорного генератора Гн2, который формирует короткий импульс ml для ударного возбуждения пьезоэлемента П акустического преобразователя АП. Преобразователь работает в совмещенном режиме, т.е. в режиме излучения и приема акустических импульсов.
Акустический импульс, сформированный преобразователем АП, излучается в среду ИС через толщу протектора Пр. Преобразователь АП построен на основе механически демпфированного пьезоэлемента П (пьезокерамика ЦТС-19 в форме диска d = 15 мм и h - 0.36 мм), заключенного в герметичный корпус из стали 12Х18Н9Т.
Фронт импульса «г» переводит триггер Т1 в состояние "1" (диаграмма н1), что вызывает замыкание выводов X ключей SW3 и SW8 детектора АД. Замкнутые выводы X ключа SW8 подают выделенное на запоминающем конденсаторе СЗ детектора АД амплитудное значение напряжения Um предыдущего принятого сигнала т4 на опорный вход компаратора ТН2 через повторитель напряжения Д2 и резистивный делитель R.
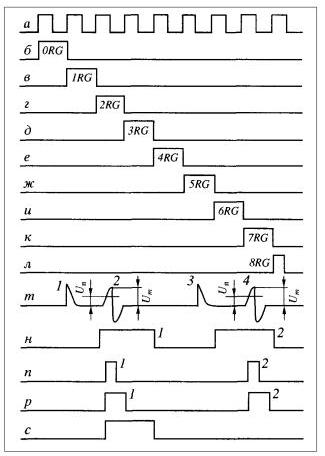
Рис. 2. Диаграммы сигналов: а - импульсы на выходе делителя СТ;
б, ж, и, к, л - импульсы на выходах 0-8 распределителя RG; ml, m3 - импульсы ударного возбуждения; т2, т4 - принятые сигналы; н1, н2 - импульсы на прямых выходах триггеров Т1, Т2; nl,n2- импульсы на выходе компаратора ТН2; pi, р2 - импульсы одновибратора F; с — импульс на прямом выходе ТЗ.
Акустический импульс после зондирования среды ИС на расстоянии 0.5S отражается от поверхности отражателя Отр и после обратного зондирования среды ИС воспринимается преобразователем АП в виде приемного электрического сигнала т2, который одновременно поступает на вход детектора АД (микросхема Д1) и на информационный вход компаратора ТН2. Конденсатор С2 детектора АД, через предварительно замкнутые выводы X ключа SW3, запоминает амплитуду Um сигнала т2.
Компаратор ТН2 срабатывает на уровне Un, задаваемом частью амплитудного зна- чения Um предыдущего принятого сигнала т4, выделенного на конденсаторе СЗ детектора АД, и формирует прямоугольный импульс nl.
Импульс nl компаратора ТН2 одновременно воздействует на вход запуска одно-вибратора F, формирующего импульс pi уровня "1" с нормированной длительностью, и на один из входов трех-входовохю мажоритарного элемента L2, на два других входа которого воздействуют импульсы «г» и «и».
Элемент L2 анализирует расположение на временной оси фронта импульса nl и обратного перепада импульса «г» и формирует на выходе сигнал уровня "1", если сравниваемые импульсы имеют уровни "1", что имеет место при 2Т > т, или сигнал уровня "О", если импульс «г» имеет уровень "О", т.е. при 2Т < т. При сигнале уровня "1" на выходе элемента L2 триггер ТЗ изменяет свое состояние (диаграмма с), при сигнале уровня "О" - не изменяет.
Сигналы "1", "О" (при 2Т > т) или "О", "1" (при 2Т < т) с выходов ТЗ воздействуют на S- и R-входы RS-триггера Т4 с тремя состояниями на выходе, выполняющего роль ключевого элемента. Триггер Т4 при воздействии на его Е-вход чтения импульса pi одновибратора F формирует импульс уровня "1" (при входных сигналах "1", "О") или импульс уровня "О" (при входных сигналах "О", "1").
Длительность импульса уровня "1" ("О") задается длительностью импульса pi одновибратора F. В перерывах между импульсами одновибратора F выход триггера Т4 переходит в высокоимпедансное состояние. Импульс уровня "1" ("О") триггера Т4 вызывает на выходе интегратора А ступенчатое увеличение (уменьшение) управляющего напряжения генератора Гн1 и приводит соответственно к повышению (понижению) частоты его колебаний.
Импульсом «е» триггер Т1 возвращается в исходное состояние (диаграмма н) - выводы X ключей SW3 и SW8 размыкаются. Импульсом «е» через логический элемент ИЛИ L3 триггер ТЗ возвращается в исходное состояние (если происходило его изменение) .
Импульсом «ж» замыкаются выводы X ключа SW7, который разряжает запоминающий конденсатор СЗ детектора АД, и выводы X ключа SW2, через которые током разряда конденсатора С1 (предварительно заряженного импульсом «е» через диод V2 и резистор R2) производится запуск генератора Гн2, формирующего очередной импульс тЗ ударного возбуждения пьезоэлемента П.
Фронтом импульса «и» триггер Т2 переводится в состояние "1" (диаграмма н2), вызывающее замыкание выводов X ключей SW5 и SW6 детектора АД. Замкнутые выводы X ключа SW5 подают выделенное на запоминающем конденсаторе С2 амплитудное значение напряжения Um предыдущего сигнала ml на опорный вход компаратора ТН2 через повторитель Д2 и делитель R.
Акустический импульс после зондирования ИС принимается преобразователем АП и в виде электрического сигнала т4 поступает на вход детектора АД и информационный вход компаратора ТН2. Конденсатор СЗ детектора АД через замкнутые выводы X ключа SW6 выделяет амплитудное значение Um сигнала т4. Компаратор ТН2 формирует импульс п2 на уровне Un принятого сигнала т4, задаваемом частью амплитудного значения Um предыдущего принятого сигнала т2, выделенного на
конденсаторе С2 детектора АД.
Далее описанный процесс повторяется с той лишь разницей, что элемент L2 анализирует расположение на временной оси фронта импульса п2 и спада импульса «и», а на Е-вход чтения триггера Т4 воздействует импульс р2, и триггер ТЗ возвращается в исходное состояние (если оно изменялось) импульсом «л» через элемент L3.
Импульсы ml и тЗ ударного возбуждения не воспринимаются компаратором ТН2, так как во время их действия на строб-входе последнего действует сигнал запрета, образуемый на выходе логического элемента ИЛИ L1 от сигналов уровня "1", действующих на инверсных выходах триггеров Т1 и Т2.
Импульсом «л» распределитель RG возвращается в исходное положение, и описанный выше процесс повторяется.
В установившемся режиме работы измерителя будут происходить чередования сигналов "1", "О" и "О", "1" на выходах триггера ТЗ, условий 2Т > т и 2Т < т и приращений (положительных и отрицательных) напряжения на выходе интегратора А и частоты f колебаний генератора Гн1. Значение 2Т будет стремиться к значению т, и среднее значение 2Т будет равно т = S/V + тн, где V - скорость звука в среде; тн - неинформативная ("паразитная") временная задержка, вызванная временными задержками акустического сигнала в протекторе Пр преобразователя АП и электрического сигнала в электронных блоках измерителя. Наличие задержки тн приводит к образованию составляющей систематической погрешности ac=-VTH/S, для исключения которой может быть рекомендовано решение, например, предложенное в [3] .
Для устойчивой работы прибора начальная частота fH генератора должна удовлетворять условию: fH < fmin(l ~ о), где fmin ~ частота, соответствующая минимальному пределу измерения скорости V звука, a - нестабильность частоты fH при воздействии внешних факторов. Для устранения нелинейности крутизны изменения частоты генератора Гн1, приводящей к образованию пульсационной составляющей систематической погрешности, может быть рекомендовано решение [4].
Частота f колебаний генератора Гн1, пропорциональная скорости V, измеряется цифровым частотомером Р.
Экспериментальный образец описываемого прибора для контроля скорости звука в морской воде имеет следующие характеристики: S = 0.1 м; К = 5; диапазон измерения 1400-1600 м/с; диапазон изменения частоты/генератора Гн1 от 140 до 160 кГц; время установления частоты колебаний генератора Гн1 при скачкообразном изменении скорости звука от 1400 до 1600 м/с не превышает 0.6 с. Калибровка описанного измерителя проводилась в дистиллированной воде при атмосферном давлении по табличным данным [5] в диапазоне скорости 1402.40-1555.20 м/с в двух режимах. В первом - преобразователь ПП помещался в спокойную (не турбулизованную) среду, и амплитуда принятого сигнала уменьшалась на 45% снижением напряжения питания генератора Гн2; во втором - преобразователь ПП помещался в турбулизованную среду, создаваемую вращающейся мешалкой. В
первом режиме изменения частоты f генератора Гн1 практически не наблюдались, во втором - не превышали 2 Гц.
Абсолютная основная погрешность преобразователя < ±0.035 м/с. Таким образом, описанная схема позволяет практически исключить шумовую составляющую случайной погрешности и повысить точность измерения.
Подвергнутый аналогичным испытаниям прототип [3] имел изменение частоты f на 20-23 Гц в первом режиме и 25-27 Гц во втором.
На базе технических решений, представленных в настоящей статье и в работах [3, 4], разработан ряд двухканальных акустических счетчиков-расходомеров жидких сред с диаметрами условного прохода от 10 до 200 мм, охватывающих диапазон расхода от 0.05 до 750 м3/ч и имеющих блок температурной коррекции изменения объема. Относительная основная погрешность измерения количества и расхода не хуже ±0.2%.
СПИСОК ЛИТЕРАТУРЫ
1. Серавин Г. Н. Измерение скорости звука в океане. Л. : Гидрометеоиздат, 1979. С. 74.
2. Титце У., Шенк К. Полупроводниковая электроника. М.: Мир, 1983. С. 297.
3. Измайлов A.M. // ПТЭ. 1994. № 4. С. 120.
4. Пирвердиев Э.С., Измайлов A.M. // ПТЭ. 1999. №2. С. 129.
5. ГСССД 117-88. Таблицы стандартных данных. Вода. Скорость звука при температурах 0-100°С и давлениях 0.101325-100 МПа. М. : Изд-во стандартов, 1989.
|

